This servo-mechanism can be used in robot manipulators, in interactive interfaces and in experimental equipment. Generated force is proportional to the control signal and does not depend on the position of the arm. This servo-mechanism is not designed to stabilize the video camera.
Before turning it on, connect the arm of the servo-mechanism to the load or restrain it by hand. Without a load, the arm will move and can tear off the sensor wire.
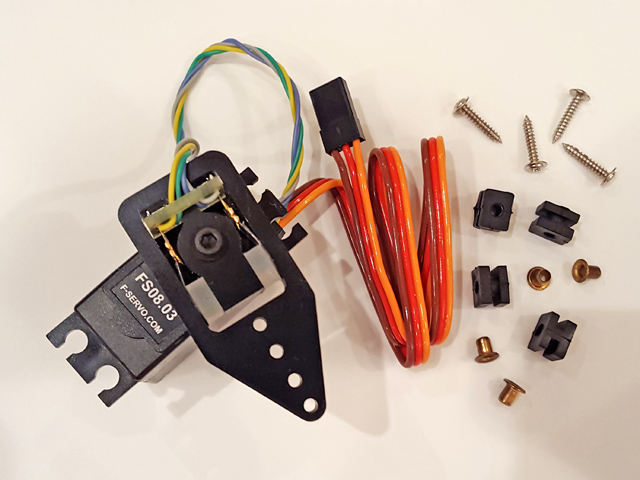
Torque - 1.8kg*cm
Speed - 0.15sec/60º
Voltage - 5V
Non linearity - 5%
Weigh - 35g
Control - Pulse Weigh, 1000-2000mks